Chapter 11 Asymmetric information: moral hazard
11.1 Introduction
Moral hazard arises when the behaviour of an individual changes as a result of entering into a contract. The asymmetry in information here is described as *hidden action*, as distinct from that of *hidden information* or adverse selection.
The issue can be studied more generally as a principal-agent problem. Many economic transactions have the feature that unobservable actions of one individual have direct consequences for another, and the affected party may seek to influence behaviour through a contract with the right incentives. In the above example, the insurance company (the principal) is affected by the unobservable carelessness of the insured (the agent): it then chooses a contract with only partial insurance to preserve the right incentives. Other economic relationships of this type include shareholders and managers, manager and salespersons, landlord and tenants etc. In the following sections, we specify a model to capture an effort choice problem and suggest contractual solutions.
The previous chapter introduced the problem of adverse selection or hidden information. This chapter aims to introduce the class of problems called moral hazard that arises when actions of an agent are hidden. The chapter considers a principal-agent relationship and aims to show how moral hazard and risk attitudes interact in determining the optimal form of incentive contracts offered by the principal to the agent.
* explain the types of problems that arise under moral hazard
* explain the problem of effort choice and analyse effort choice in a principal-agent model
* explain the trade-off between risk-sharing and effort incentives in the principal-agent model and analyse the optimal risk-sharing arrangement under full and asymmetric information
* explain informally the impact of moral hazard in a variety of settings.
11.3 Effort choice and incentive contracts: a formal model
A principal (P ) hires an agent (A) to carry out a particular project. Once hired, A chooses an effort level, and his choice affects the outcome of the project in a probabilistic sense: higher effort leads to a higher probability of success, and that translates into a higher expected profit for P . If the choice of effort was observable, P could stipulate, as part of the contract, the level of effort that is optimal for her (that is, for P ). When effort cannot be monitored, P may yet be able to induce a desired effort level, by using a wage contract with the right incentive structure. What should these contracts look like? The formal structure can be set up as follows:
1) Let e denote the effort exerted by the agent on the project. A can either work hard (choose e = e_H ) or take it easy (choose e = e_L ). An informational asymmetry arises when the choice of e cannot be monitored by P .
Let the random variable π denote the (observable) profit of the project. Profit is affected by the effort level chosen, but is not fully determined by it. (If it was fully determined, the principal can infer the true effort choices by observing the realisation of π: we would no longer be in a situation of hidden actions.) Higher effort leads to higher profit in a probabilistic sense. Assume that π can be either high (π_H ) or low (π_L ). Let P (π | e) be the probability of π under effort e.
2) Under high effort, the high profit is more likely. Therefore, we have:
P (π_H | e_H ) > P (π_H | e_L ).
3) The principal is risk-neutral: she maximises expected profit net of any wage payments to the agent.
4) The agent is risk-averse in wage income, and dislikes effort. His utility function takes the form:
v(w, e) = u(w) − g(e)
where w is the wage received from the principal, g(e) is the disutility of effort and u is the vN–M utility function, where u 0 > 0, u'' ≤ 0 (implying risk aversion). Finally, high effort is more costly so g(e_H ) > g(e_L ).
Note the central conflict of interest here. The principal would like the agent to choose higher effort, since this leads to higher expected profits. But, other things being equal, the agent prefers low effort. However, (to anticipate our conclusion), if the compensation package is carefully designed, their interests could be more closely aligned. For instance, if the agent’s compensation increases with profitability (by means of a profit-related bonus, say), the agent would be tempted to work hard (because high effort will increase the relative likelihood of more profitable outcomes). However, this will also make the agent’s compensation variable (risky), and that is not so efficient
from a risk-sharing perspective. The inefficiency in risk-sharing will be an unavoidable consequence of asymmetric information.
5) The principal pays the agent a profit-contingent wage schedule {w_H , w_L }. Here w_H is the wage paid if the profit is π_H , and w_L is the wage paid if the profit is π_L . In general, w_H > w_L . Note that if w_H = w_L = w ∗ , the principal is paying a fixed wage w^∗ that does not depend on the profit level. A fixed wage gives full insurance to the agent (income does not vary no matter what the profit is). However, if w_H > w_L , the wage schedule carries risk.
6) Let u_0 be the reservation utility of the agent. This is the expected utility the agent gets from alternative occupations.
11.4 Full information: observable effort
The case of observable effort serves as a benchmark. Once we know what the outcome is under full information, we can judge the outcome under asymmetric information against the benchmark and see how much extra inefficiency arises from the presence of asymmetric information.
Suppose effort is observable. The principal can then write a contract with the agent directly specifying effort. Suppose the principal wants to specify e_H . What wage must be paid?
The agent would agree to undertake e H so long as he obtains a utility of at least u_0.
This is called the agent’s participation constraint (PC). This is given by:
P(π_H | e_H ) u(w_H ) + P (π_L | e_H ) u(w_L ) − g(e_H ) > u 0
Optimality of a fixed wage under observable effort
Which wage schedule should the principal choose to implement e_H ? If the agent chooses effort e_H , the principal gets the surplus:
P(π_H | e_H ) (π_H − w_H ) + P (π_L | e_H ) (π_L − w_L ).
Choose a wage schedule (w_H , w_L ) which just satisfies the agent’s PC, i.e. PC holds with equality.
Suppose the wage schedule is risky, i.e. w_H > w_L . Starting from this, can the principal do better? Recall that the principal is risk-neutral while the agent is risk-averse. In other words, when the principal gives the agent a risky wage, there is inefficient risk-sharing. Facing a risky wage, the agent would pay to buy income insurance. But the principal is risk-neutral, so she can give this insurance to the agent and extract that payment (i.e. reduce the expected wage). In yet other words, starting from a fixed wage that just satisfies PC, if the principal replaces the fixed wage with a risky wage, the agent will not participate as his payoff will fall below u_0.
11.5 Asymmetric information: unobservable effort
Implementing low effort e_L
Note that the principal does not need to provide incentives not to work hard. In fact, whenever there are no particular incentives to work hard, the agent would automatically choose low effort. We know that ideally the principal wants to pay the agent a fixed wage as that allows the principal to satisfy the agent’s PC at the lowest possible expected wage payment. But a fixed wage provides no incentive to work hard! The agent gets the same wage no matter what the profit level is, so he might as well exert low effort.
The principal can simply pay a fixed wage w^∗∗ that just satisfies the agent’s PC to implement e_L . Here w^∗∗ is given, as in the full information case, by:
u(w^∗∗ ) − g(e_L ) = u_0
Implementing high effort e_H
We know from above that under asymmetric information, implementing e_L is a trivial problem. However, implementing high effort is a non-trivial problem. Now the principal not only must ensure that the agent accepts the wage contract, the agent must also be given some incentive to ensure that he exerts high effort e_H . Specifically, the wage schedule {w_H , w_L } that the principal offers must satisfy the two constraints described below.
1) The wage schedule must satisfy the agent’s PC, i.e. it must be such that the agent’s payoff under e_H is at least as large as u_0 :
P(π_H | e_H ) u(w_H ) + P(π_L | e_H ) u(w_L ) − g(e_H ) > u 0
2) The compensation package must also be such that the agent prefers to exert e_H rather than e_L . In other words, the wage schedule must create the right incentives for choosing high effort over low effort. This is called the incentive compatibility constraint IC. This is given by:
P(π_H | e_H ) u(w_H ) + (π_L | e_H ) u(w_L ) − g(e_H ) >
P(π_H | e_L ) u(w_H ) + P(π L | e_L ) u(w_L ) − g(e_L )
Note that a fixed wage cannot satisfy the IC. If the wage is fixed, we have w_H = w_L = w . Putting some risk on the agent is unavoidable in providing an incentive for high effort. To determine the optimal values of w_H and w_L , we need to maximise the surplus of the principal subject to the PC and IC.
11.6 Risk-neutral agent
The analysis above explained the trade-off between risk-sharing and incentives with a risk-neutral principal and a risk-averse agent. Putting risk on the agent is good for incentives but bad for risk-sharing, and bad risk-sharing is costly for the principal. If, however, the agent is risk-neutral, the problem of the principal becomes a trivial one. Now there is no trade-off: putting risk on the agent is not costly, so the principal can generate incentives for free.
In particular, the principal can simply put all the risk on the agent and ask for a fixed fee (akin to a franchising contract). This contract leads to the same outcome as when effort is observable. Why? Note that the agent’s problem is the same as the principal’s problem if the principal faced a lump-sum tax. But a lump-sum tax does not change anything – the agent would optimally choose whatever the principal would have chosen under full information. In other words, it is exactly as if the principal has ‘sold’ the project to the agent, so that the agent has all the incentive as the ‘owner’ to choose the profit-maximising effort.
Reading: Nicholson, W., Synder, C., Intermediate Microeconomics and its application (eleventh edition), South-Western, Cengage Learning, 2010
Chapter 15: Asymmetric Information
Using game theory, we will analyze a series of models in which one player has better information about the uncertain economic environment than others. This extra information is variously referred to as hidden, private, or asymmetric information. Game theory will enable us to better understand the
range of clever strategies that might be used to cope with asymmetric information. Even if market participants can resort to such clever strategies, the market will be less efficient than if all
participants had full information.
p529
Principal: Player offering the contract in a principal-agent model.
Agent: Player who performs under the terms of the contract in a principal-agent model.
p530
Moral-hazard problem: A version of the principal-agent model in which the agent’s action is private
information.
Adverse-selection problem: A version of the principal-agent model in which the agent’s type is private information
p532
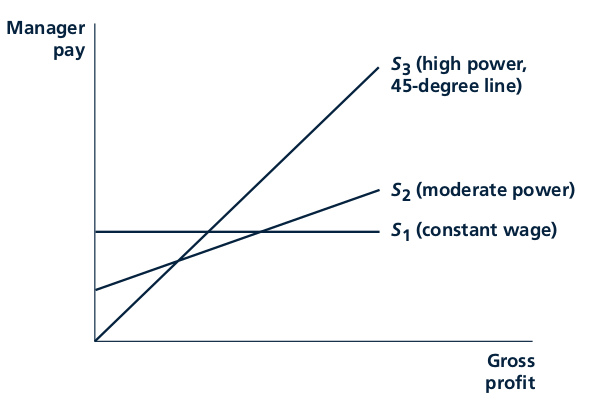
Lines S_1 , S_2 , and S_3 correspond to various incentive contracts, which link the manager’s pay to the firm’s performance (here, gross profit). The slope of the incentive scheme is also called its ‘‘power.’’ It is a measure of how closely linked the manager’s pay is with firm performance, ranging from no linkage (constant wage, line S_1 ) to a one-for-one linkage
(high power, line S_3 ).
p535
High-powered incentives would seem to solve the moral-hazard problem. Unfortunately, there are factors outside of our simple model that lead to problems with high-powered incentive schemes. The problem that has received the greatest attention in the economics literature is risk aversion on the part of managers. Suppose that there is uncertainty regarding the firm’s gross profit. While the manager’s effort will increase the chance of high profits, there are other random factors outside of the manager’s control that also may matter. If gross profit depends on random factors in addition to
the manager’s effort, then tying the manager’s pay to gross profit will introduce uncertainty into the manager’s pay. The higher the power of the incentive scheme, the more uncertainty is introduced .... Managerial risk aversion would not prevent the shareholders and manager from attaining the efficient outcome if effort were observable.
p536,538
To summarize the main point of this subsection, there is a trade-off between effort incentives and risk. High-powered incentive schemes induce a lot of effort, but expose risk-averse managers to a lot of risk and may require a high fixed payment to the manager to accept the risk. At the other extreme, a constant wage induces no effort but does not expose the manager to any risk. The optimum in the
presence of a risk-averse manager may involve some compromise between the two extremes.
p538